

在没有普及倒车影像之前,我们在倒车时主要是靠倒车雷达来探测盲区障碍物。本以为倒车雷达的灵敏度,是可以无条件信任的。自从我有次倒车时,信心满满地等着倒车雷达发出的提示音时,”咣当“一声。。。

吸取了一次教训之后,每次倒车时都会更加谨慎。不过,为了搞清楚倒车雷达的灵敏度以及探测范围,特地做了一番测试。得出的结果,让人很意外,原来倒车雷达也存在盲区。
首先我们来看看倒车雷达的工作原理:
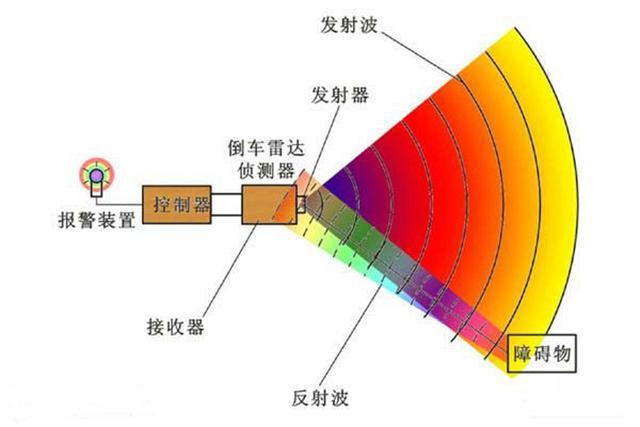
倒车雷达全称叫"倒车防撞雷达",是汽车泊车或者倒车时的安全辅助装置。由超声波传感器(保险杠上安装的探头)、控制器和预警装置等部分组成。能以声音或者更为直观的显示,告知驾驶员周围障碍物的情况。
倒车雷达的工作原理,模仿了蝙蝠飞行时发出的超声波定位原理。安装在车体的探头释放超声波,遇到障碍物时,产生回波信号。探头接收到回波信号,反馈给控制器进行数据处理,最后由预警装置发出提醒,探头一般能探测到1.5米或2米以内的障碍物。

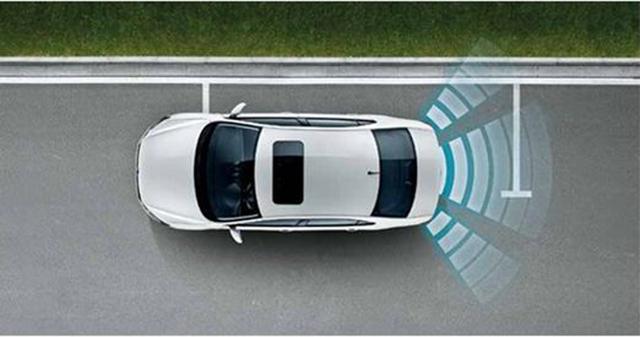
通过测试我们发现,探头所发出的波束为圆锥扩散型。在波束有效范围内,离探头距离越远,盲区越小;反之离探头越近,盲区越大。一般遇到地面高度40厘米以下,80厘米以上的的障碍物(测试车型数据,不代表所有车型),倒车雷达的灵敏度会降低很多,甚至是检测不到。当遇到,桩体、电线、铁丝网等纤细的物体时,倒车雷达对障碍物的预警也是时有时无。

不可否认,科技的发展让我们驾车出行,更加轻松便捷了。但是,再科技的配置也不能保证无误,即便是倒车影像、全景影像也会产生较小的盲区和距离差。由于,倒车影像使用了广角摄像头,车内所呈现的景象距离会与实物有误差,这就要我们在操控车辆时融入自己的判断,不能完全地依赖倒车雷达或倒车影像。