

上个月,Velodyne实验室宣布推出了128线激光雷达——Velodyne VLS-128™。
先说说这款激光雷达。VLS-128™是HDL-64E线激光雷达的接班人,是一款用于实现SAE L4\L5自动驾驶的传感器。未来Velodyne会把VLS-128™会做成ASIC版(当天展示的还不是ASIC版本),并且过车规等级。
目前,这款产品的参数还没有固化,详情会在2018年CES公布。官方给出的参考信息是:
采用905nm光源
探测距离200m+
水平视角360°,水平角分辨率可以达到0.1°
垂直视角40°,局部垂直角分辨率可以达到0.17°
现场我们借助PC看到了VLS-128的实时点云图,也就是这款激光雷达眼中的世界。车云菌主要关注了分辨率和探测距离两项。

VLS-128™实时点云图

人站在距激光雷达2~5m处,我们可以从点云图中看到5根手指
你可以发现激光束垂直方向的分布是不等距的,中间线附近密集,两边稀疏。这样设计是考虑到车用场景的需要,因此中间线附近的分辨率要高一些。展示时,人站在距离激光雷达2~3m处,我们可以从点云图中看到5根手指。

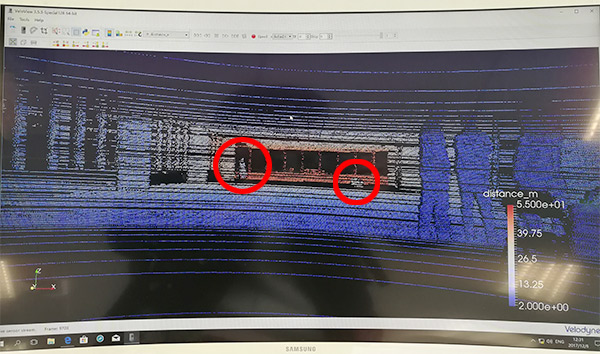
图中不同颜色代表不同的探测距离。受限于展示空间,现场展示的最远探测距离为50米左右。
Velodyne有数十年激光雷达的研究经验,未来支持车规的产品会有两款:
一款是今天展示的VLS-128,内部带有旋转部件,主要客户是自动驾驶出租车,安装位置是车顶。单个供货价格可能会接近HDL-64E。

Velarray
另一款是不带任何旋转部件的Velarray,尺寸为125x50x55毫米,探测范围覆盖垂直35°,水平120°。产品可以安装在汽车前方、侧面,或是拐角,用多个配置的方式做到车身水平360°覆盖。
这两款都是高分辨率激光雷达。传统做法是,大家一开始用高分辨率激光雷达做研究,之后逐渐用降维的方式来降成本。对工程师来说,直接用低分辨率激光雷达比较困难。虽然今天展示的这款激光雷达是128线,未来Velodyne会根据客户需要定制64线、32线、16线产品。而Velarray采用了自主研发的固态激光雷达技术,更加便于降成本,适用于价格敏感的乘用车。
激光雷达技术在不断往前发展进步。现场交流中,John Eggert还提到了很多正在进行中的项目。比如他们的工程师正在将摄像头和激光雷达做硬件融合,做到一个传感器兼得激光雷达数据和RGB信息,因此具备了读懂红绿灯的能力。
虽然现在Velodyne只出售激光雷达硬件,但是他们已经在总部组建了一支软件团队,未来会把研发好的激光雷达软件算法做到ASIC版本中去。