


近日,重庆第一辆 5G 无人驾驶巴士在该公司内部开始试运行,随着 5G 开始规模化落地,普遍应用的时代即将到来。

该款无人驾驶巴士是重庆移动与华为公司、东南大学先进车辆与新能源汽车实验室、法国 Easy Mile 联合研发测试。本次无人驾驶巴士顺利测试也离不开 5G 技术的支持。
据悉,在重庆移动内部测试成功以后,该技术后续会应用于 5G 智慧城无人定制公交场景。

5G对无人驾驶又怎样的促进作用?
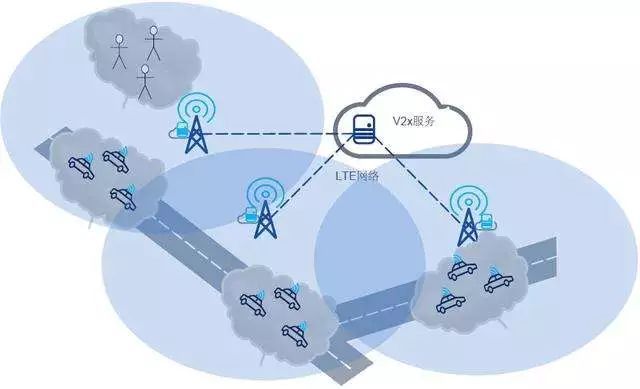
5G 在无人驾驶中只是作为 V2X 的通讯载体,也不是唯一,还有 DSRC。两者属于不同的标准体系。所以 5G 跟无人驾驶技术不能混为一谈,5G 的短延迟特性使云端的远程操控变得可行。5G 里的 URLLC,也就是高可靠低时延业务,主要就是用于无人驾驶。
然而,无人驾驶 L5 需要 URLLC(超高可靠低时延),甚至由于物联网各种传感器太多,或许还需要 mMTC(海量机器类终端通信),而 URRLC 和 mMTC 将是 5G 标准最后落地的标准,至少要到 2020 年、甚至以后才可能真正的成型。
自动驾驶汽车的工作流程大致是:感知层对环境系统的感知传输给决策层,决策层对环境感知的结果做解析,然后决策层制定驾驶策略传输给执行层。

非 5G 网络环境下的无人驾驶都称不上真正意义上的无人驾驶。
因为无人驾驶依靠的最核心技术是高精地图。
高精度地图通过对周围静态的环境进行精确描述,来延伸传感器的感知范围,以更为精细的尺度帮助汽车了解所处的位置、周围的环境状况、应该如何进行下一步操作等定位决策问题。
相比传统导航地图,高精度地图图层更多,地图信息量更大。从图层数量上看,高精度地图包含图层数更多,可以包含诸如道路级别、交通设施等更多的数据;从图层质量上看,高精度地图每一图层的描绘更精细,从而可以实现厘米级导航。高精地图提供自动驾驶所需专用道路信息,带来机器必需的信息。高精度地图除了拥有传统导航地图具备的道路形状,通行方向,车道等信息,高精度地图包含了诸如车道分隔物类型、交通标志、限速等信息,和一些道路几何的三维信息,像弯道、斜坡等。
无人驾驶为什么非5G网络不可?
1.因为高精地图需要实时更新,通过传感器、摄像头采集到的信息通过通讯手段(比如 5G 网络)与云端做交互,能使得地图更加智能。基于智能地图信息的路径规划,通行效率更高。
2.高精地图的数据量巨大,达到 Gbit/公里级别或以上,以尽量少的时间完成更新,需要超高速带宽。
3.高精地图可以提供一幅雷达和视觉探测距离之外(NLOS)的特定物体(移动的行人和车)信息,以及红绿灯、限速要求信息,基于此信息进行避障规划(包括车车博弈,车人博弈等),基本可确保无人车在开放道路上的安全问题,不会发生任何形式的主动碰撞以及交通违章等。这部分内容的通讯时延要求 ms 级。
关于高精地图,可参见文章:高精地图对自动驾驶来说有多重要?一般的导航地图为什么做不到?
车联网时代的无人车全局路径规划,一般是云端决策或者云端辅助决策,对网络时延要求极高,部分场景下要求达到 ms 级(毫秒,也就是千分之一秒)。
车辆的传感器和摄像头采集到的画面相当于人类的眼睛,自动驾驶系统的逻辑推理和决策相当于人类的大脑,自动驾驶系统的运动控制操作相当于人类的手和脚,这些信息实时互通需要超高速传输和超高的可靠性、超低的时延。相对 4G 网络,5G 传输速率提升 100 倍,峰值传输速率达到 10Gbit/s,端到端时延达到 ms 级。打个比方,下载一部 1G 容量的电影通过 4G 网络需要至少 30 秒,通过 5G 网络只需要 0.8 秒,你可以相像一下,当车辆行驶在路上遇到突发情况,反应速度有多么关键!只有 5G 这样的超高速率和超低时延才能满足无人驾驶的要求。
然后还需要进一步验证不同类型信息在 5G 网络中的表现,例如红绿灯信息、路面气象信息(积水、结冰)、道路状况信息(破损、限速)、无人车感知信息、MEC 对无人车博弈的决策处理、路口通行时的车车、车人通行博弈处理能力等。
无人驾驶需要网络提供低时延、高可靠、高流量、高移动等支持,高精地图也是无人驾驶车的重要一环,它提供的路线规划、轨迹规划至关重要。