

汽车的各种操纵系统正向电子化、自动化方向发展,在未来十年内,传统的汽车机械操纵系统将变成通过高速容错通信总线与高性能CPU相连的电气系统。如汽车将采用电气马达和电控信号来实现线控驾驶(steer by wire)、线控制动(brake by wire)、线控油门(drive by wire或者throttle by wire)和线控悬架(suspension by wire)等,采用这些线控系统将完全取代现有系统中的液压和机械控制。
一、SBW线控转向系统
SBW的英文全称是Steering By Wire。中文意思是“线控转向系统”。该系统去掉了转向盘和转向轮之间的机械连接,减轻了大约5kg重量,消除了路面的冲击,具有降低噪声和隔振等优点。目前国外著名汽车公司和汽车零部件厂家竞相研究具有智能化的新一代转向系统,如美国Delphi公司、TRW公司、日木三菱公司、Koyo公司、德国Bosch公司、ZF公司、BMW公司等都相继在研制各自的SBW系统,国内也开始涉足这一相关研究领域。
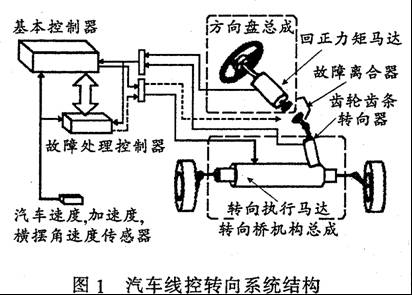
SBW系统由方向盘模块、转向执行模块和ECU3个主要部分以及自动防故障系统、电源等辅助模块组成。
方向盘模块包括方向盘、方向盘转角、力矩传感器、方向盘回正力矩电机。方向盘模块的主要功能是将驾驶员的转向意图(通过测量方向盘转角)转换成数字信号并传递给主控制器;同时接受ECU送来的力矩信号,产生方向盘回正力矩以提供给驾驶员相应的路感信号。转向执行模块包括前轮转角传感器、转向执行电机、转向电机控制器和前轮转向组件等。转向执行模块的功能是接受ECU的命令,控制转向电机实现要求的前轮转角,完成驾驶员的转向意图。ECU对采集的信号进行分析处理,判别汽车的运动状态,向方向盘回正力电机和转向电机发送命令,控制两个电机的工作。自动防故障系统是线控转向系的重要模块,它包括一系列监控和实施算法,针对不同的故障形式和等级作出相应处理,以求最大限度地保持汽车的正常行驶。汽车的安全性是必须首先考虑的因素,是一切研究的基础,因而故障的自动检测和自动处理是线控转向系统最重要的组成系统之一。
SBW的工作原理是当转向盘转动时,转向传感器和转向角传感器将测量到的驾驶员转矩和转向盘的转角转变成电信号输入到ECU,ECU依据车速传感器和安装在转向传动机构上的位移传感器的信号来控制转矩反馈电动机的旋转方向,并根据转向力模拟,生成反馈转矩,控制转向电动机的旋转方向、转矩大小和旋转角度,通过机械转向装置控制转向轮的转向位置,使汽车沿着驾驶员期望的轨迹行驶。
二、DBW线控油门系统
DBW的英文全称是Drive By Wire也可以称作Throttle By Wire。中文意思是“线控油门”或者“电控油门”。线控油门系统主要由油门踏板、踏板位移传感器、电控单元ECU、数据总线、伺服电动机和油门执行机构组成。
传统的油门控制方式是驾驶员通过踩油门踏板,由油门拉索直接控制发动机油门的开合程度,从而决定加速或减速,驾驶员的动作与油门动作之间是通过拉索的机械作用联系的。
而线控油门系统将这种机械联系改为电子联系。驾驶员仍然通过踩油门踏板控制拉索。但拉索并不是直接连接到油门,而是连着一个油门踏板位置传感器,传感器将拉索的位置变化转化为电信号传送至汽车的大脑ECU(电子控制器),ECU将收集到的相关传感器信号经过处理后发送命令至油门作动器控制模块,油门作动器控制模块再发送信号给油门作动器,从而控制油门的开合程度。也就是说驾驶员的动作与油门的动作之间是通过电子元件的电信号联系的。虽然从构造上来看,线控油门比传统油门控制方式复杂,但油门的控制却比传统方式精确,发动机能够根据汽车的各种行驶信息,精确调节进入气缸的燃油空气混合气,改善发动机的燃烧状况,从而大大提高了汽车的动力性和经济性。
三、BBW线控制动系统
BBW的英文全称是Brake By Wire,中文意思是“线控制动系统”。
传统车辆制动系统的气体或液体传输管路长,阀类元件多。对于长轴距或多轴车辆及远距离控制车辆,由于管线长及速度慢,易产生制动滞后现象,制动距离增加,安全性降低,而且制动系统的成本也较高。
与传统的制动系统不同,线控制动以电子元件代替部分机械元件,成为机电一体化的制动系统。在电子控制系统中设计相应程序,操纵电控元件来控制制动力的大小及制动力的分配,可完全实现使用传统控制元件所能达到的ABS及ASR等功能。
线控制动系统目前分为两种类型,一种电液制动系统EHB (Electro-hydraulic Brake), 另一种为电子机械制动系统EMB(Electro-mechanicalBrake)。
(一)电液制动系统
EHB由传感器、ECU(电子控制单元)及执行器(液压控制单元)等构成。制动踏板与制动器间无直接动力传递。制动时,制动力由ECU 和执行器控制,踏板行程传感器将信息传给ECU,ECU汇集轮速传感器、转向传感器等各路信号,根据车辆行驶状态计算出每个车轮的最大制动力,并发出指令给执行器的蓄能器来执行各车轮的制动。高压蓄能器能快速而精确地提供轮缸所需的制动压力。
电液制动系统的优点是能够改善系统的性能和操作人员的舒适性。制动阀可安装在远离驾驶室更接近于制动器的位置,以减少管路的消耗。无需采用更多的液压阀及管路就能使远程操作更容易。将电液技术引入全动力系统,需要安装带有踏板角度传感器的电子踏板、电控单元、阀驱动器及电液制动阀以取代原有的连接和压力制动阀。保留原系统中的带有安全阀的泵、蓄能器充液阀、蓄能器及制动器。电子踏板可以提供与踏板转角成比例的反馈力。踏板角度传感器将踏板角度转换为电信号,输入电子控制单元。可编程控制单元将控制电流输入到比例电磁阀的电磁线圈。阀芯移动到所输出的制动压力与电磁线圈力按比例保持平衡的位置。尽管看起来从踏板转换到制动压力更复杂,但可编程的控制单元使系统设计者能够实现机械系统无法达到的更柔性的传递功能。当用于比例系统时,该阀能够为线控制动系统、防抱制动系统及牵引控制系统提供无动力常规制动和紧急制动所需要的液压动力。
(二)电子机械制动系统
EMB电子机械制动系统和液压制动系统就制动原理来说是相同的,其车轮和制动装置的主要部分是相同的。只是在电子机械制动系统中,电源代替了液压源,机电作动器代替了液压作动筒。小型车辆的EMB 主要包含以下部分:(1)电制动器。其结构和液压制动器基本类似, 动作器是电动机;(2)电制动控制单元(ECU)。接收制动踏板发出的信号,控制制动器制动;接收驻车制动信号,控制驻车制动;接收车轮传感器信号,识别车轮是否抱死、打滑等;控制车轮制动力,实现防抱死和驱动防滑并兼顾其他系统的控制;(3)轮速传感器。准确、可靠、及时地获得车轮的速度;(4)电源。为整个电制动系统提供能源,与其他系统共用。此外,在电制动系统中增加了力矩传感器。
在电子机械制动装置中,其中一种是通过一个大直径的滚珠螺杆机构将电动机的旋转运动转变成压头的直线运动。制动调节器用来控制电动机的运转。制动调节器接收制动防滑控制盒指令和车轮力矩传感器的信号,可以自动调节电动机的电流和电压,从而调节制动力矩。
电动制动装置中除了采用电动机外, 还可以使用电磁离合器,使制动盘压紧或松开。新型电磁制动器由电磁体、制动蹄、销轴、制动杠杆、回位弹簧等组成。其工作原理为:电磁体可视为一E型电磁铁,采用车载电瓶供电,制动鼓相当于衔铁,这样经过气隙形成闭合回路。当需要制动时,接通电磁体上电源,电磁体产生吸力,被吸到制动鼓上并被其带动旋转,从而带动制动杠杆从动端将制动蹄顶开,直至制动蹄上的摩擦片与制动鼓的内圆柱面接触产生摩擦,并被制动鼓带动转动,此时制动杠杆继续被电磁体带动转动,制动鼓在与电磁体、制动蹄的摩擦力的作用下不断减速,直至停止转动。制动完成后,断开电磁体的电源,电磁体失去磁力而脱离制动鼓端面,回位弹簧将制动蹄拉回原位,摩擦片与制动鼓脱离,制动消除。
线控系统的关键技术
由于线控系统取消了传统的气动、液压及机械连接,取而代之的是传感器、ECU、电磁的执行机构,因而传感器的精度,ECU硬件的可靠性、抗干扰性,控制算法的可靠性、容错性,执行机构的快速性、可靠性及不同系统ECU之间通信的实时性,总线的容错性和仲裁能力及动力电源等都制约着线控技术的广泛应用。制约线控技术的关键技术包括以下几方面。
1、传感器技术
传感器是组成线控系统的基本且重要单元,无论是EHB、EMB,还是SBW等都是由许多传感器构成,例如SBW系统由角位移传感器、转矩传感器、车速传感器、侧向加速度传感器、横摆角速度传感器等组成,它们构成了SBW的主要部分。而汽车电子控制系统的控制效果却紧紧依赖于传感器的信息采集和反馈精度,因而传感器的科技含量直接影响整个汽车电子控制系统的性能。如何制造出体积小、成本底、可靠性高而且测量精度高的传感器就成为线控系统的关键技术之一。
2、总线技术
汽车各电子系统的ECU如何进行信息通讯及各系统如何进行集成,在很大程度上依赖于总线技术。目前存在着多种汽车总线标准,未来会使用具有高速实时传输特性的一些总线标准和协议。这一类总线标准主要有时间触发协议(TTP)、Byteflight和FlexRay。TTP是一个应用于分布式实时控制系统的完整的通信协议,能够支持多种容错策略,具有节点恢复和再整合功能;BMW公司的Byteflight可用于汽车线控系统的网络通信,其特点是既能满足某些高优先级消息需要时间触发,以保证确定延迟的要求,又能满足某些消息需要事件触发,需要中断处理的要求;FlexRay是一种特别适合下一代汽车应用的网络通信系统,具有容错功能和确定的消息传输时间,能够满足汽车控制系统的高速率通信要求。
3、动力电源技术
在EHB系统中,由于制动力矩由液压提供,所以良好设计的14V电压可以满足要求;而在EMB系统中,由于制动力矩直接由电机提供,使得所需电源功率增大,而提高电压是增大功率的好方法,所以传统的14V系统不再能很好地满足要求;在SBW系统中,ECU、2个冗余转矩反馈电动机和2个冗余转向电动机,其总功率大约在550~880W,所需电源能量相当大。如何提供足够的电能保证系统的稳定运行成为解决问题的关键,42V电压系统的研究和电动汽车的深入研究为此技术的解决提供了平台,为线控技术的广泛应用打下了基础。
4、容错控制技术
为了满足汽车可靠性与安全性要求,线控系统必须采用容错控制技术,容错控制设计方法有硬件冗余方法和解析冗余方法2种。硬件冗余方法主要是通过对重要部件及易发生故障部件提供备份,以提高系统的容错性能;解析冗余方法主要是通过设计控制器的软件来提高整个系统的冗余度,从而改善系统的容错性能。在SBW系统中,相对于ECU来说,传感器和执行机构更易发生故障,一些传感器和执行机构间存在着冗余,冗余是实现容错控制的基础,一旦某部件发生故障,利用冗余关系可用其他部件代替故障部件,以消除故障。相对传感器和执行机构来说,ECU的可靠性较高,但一旦ECU出现故障时,后果更为严重,系统不能进行任何操作。基于容错控制技术的SBW系统,在不影响系统控制功能的情况下,容错控制技术提高了转向系统的可靠性,保证了车辆的正常行驶及安全性。而可靠性和安全性是制约SBW系统应用的主要瓶颈之一。当SBW系统的可靠性和安全性能够达到普通动力转向系统水平时,其产业化也就指日可待了。