液压式主动悬架控制系统
如图4所示,液压悬架控制系统由以下部件组成:
①液压源:可以提供最大压力油流量。
②蓄能器:安装于液压源单元,吸收液压源产生的脉冲压力。
③多阀模块:包括决定液压源输出压力的主溢流阀,保持车身高度的主单元阀和先导控制单元阀,控制车身高度的流量控制阀,以及失效安全阀。当控制系统发生异常时,失效安全阀可以改变液压油路,防止车身高度突然变化。
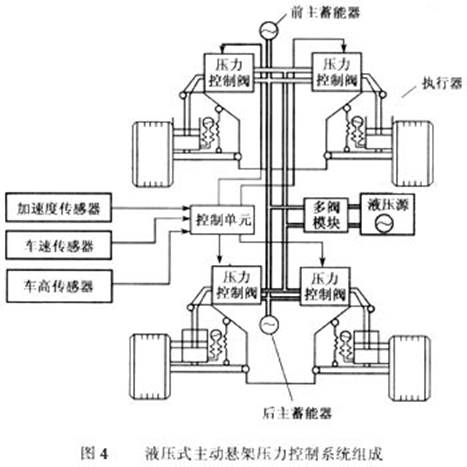
④主蓄能器:安装于前轴和后轴,贮油并根据需要向执行器供油,当发动机熄火时,可保持车身高度不变。
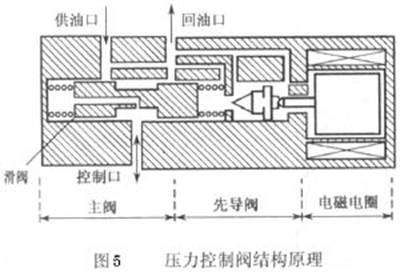
⑤压力控制阀:结构原理如图5所示,具有三个油口的主阀和一个先导比例电磁控制阀。压力控制阀根据控制单元的输入驱动电磁铁调节先导阀,使阀芯移动,调节压力执行器的压力;为使阀芯响应由路面激励引起的执行器的压力波动,采用了反馈控制,通过阀芯移动使执行器压力保持稳定。
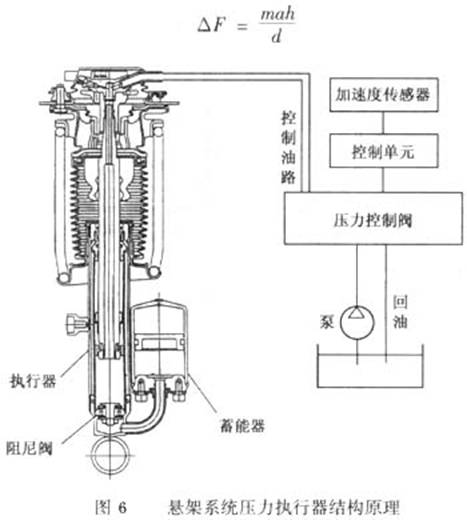
⑥压力执行器:是一带有阻尼阀和蓄能器的单作用液压动力缸,其结构原理如图6所示。
⑦控制器:接收来自加速度、车身高度和车速等传感器的信号,发出控制信号驱动压力控制阀,并向指示灯和安全阀发出信号。
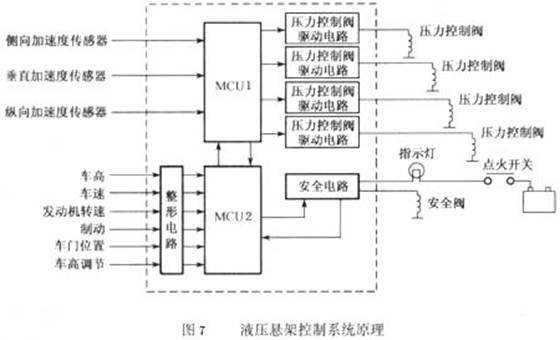
如图7所示为液压悬架控制系统的原理图,由两个16位单片机(MCU1和MCU2)构成,MCU1处理来自于加速度传感器的信号,发出控制信号驱动压力控制阀。MCU2处理来自于车身高度和车速等传感器的信号,与MCU1通信并向指示灯和安全阀发出信号。正常情况下,MCU1和MCU2彼此完成各自的任务。但异常情况发生时,失效安全阀获得信号并动作以保证系统安全可靠。
液压悬架控制系统的控制功能有:
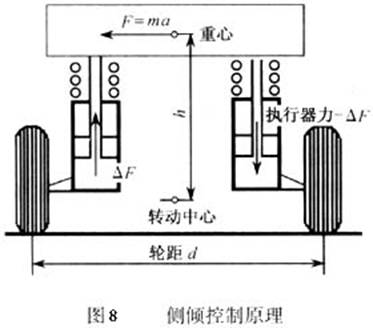
①侧倾控制:由侧向加速度传感器检测引起车辆侧倾的惯性力,然后启动侧倾控制,使作用于外圈车轮的控制压力增加,内圈的控制压力减少。如图8所示,液压缸产生的控制力ΔF为:
式中,m为车身质量,a为侧向加速度,h为车身重心距转动中心的纵向高度,d为轮距。
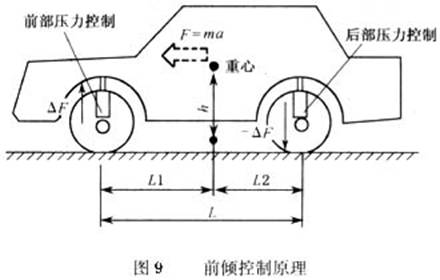
②前倾(点头)控制:制动时会在车辆的重心产生惯性力并使汽车发生前倾(点头)。纵向加速度传感器检测到这种惯性力后,相应增加前部的控制压力,同时减少后部的控制压力。如图9所示,液压缸产生的控制力△F为:
![]()
式中,m为车身质量,a为纵向加速度,h为车身重心距转动中心的纵向高度,L为轴距。
③跳动控制,利用垂直重力传感器检测车身加速度,通过对加速度进行积分计算,可以得到车的绝对垂直速度。通过压力控制阀产生与绝对垂直速度成比例的力,这样,无论路面如何变化并作用于车身,都可以阻碍车身的运动。
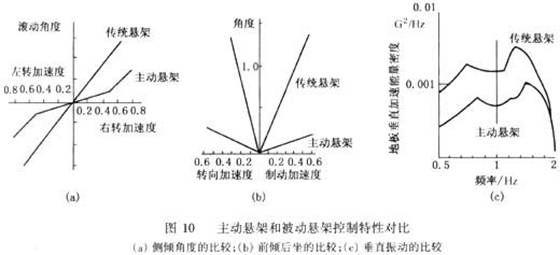
如图10所示为在三个不同的控制方向上主动悬架和被动悬架控制特性的对比,由此可见,主动式悬架具有明显的控制优势。