

第一项,自动泊车入位

遥控泊车功能可以让驾驶者在车外远程控制车辆进入和驶出狭窄停车位或车库。驾驶者可在车外通过BMW智能触控钥匙激活遥控泊车功能。
停车距离控制系统(PDC)、自动泊车辅助系统和四周传感器会监控整个停车过程。为了使用遥控泊车功能,车辆应直对停车位或车库,且居中停放。在停车过程中,驾驶者在必要时可控制车辆停止。
车停止后,可通过钥匙关闭发动机。若需要继续前进,可通过钥匙重新启动发动机。遥控驶出停车位时,车辆会自动直线倒车。
第二项,发动机启停技术

发动机启停就是在车辆行驶过程中临时停车(例如等红灯)的时候,自动熄火。当需要继续前进的时候,系统自动重启发动机的一套系统。行驶中只要直接踩制动踏板,车辆完全停止大概两秒钟后发动机就会自动熄火,一直踩着制动踏板,发动机就会保持关闭。只要一松开刹车,或者转动方向盘,发动机又会马上自动点火,立即又可以踩油门起步,整个过程都处于D挡状态。据介绍,这套系统能在城市工况下达到15%的节油能力。
第三项,主动刹车/主动安全系统
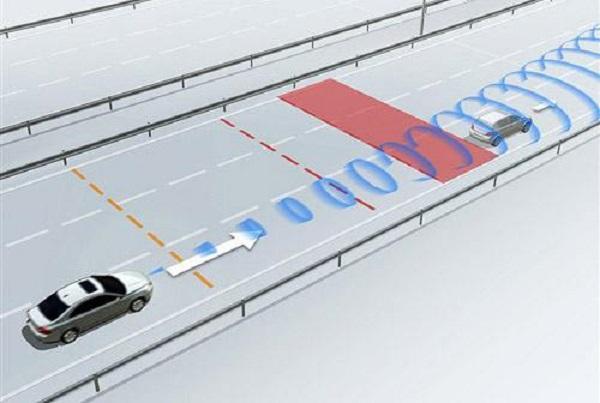
主动刹车功能是指车辆在非自适应巡航的情况下正常行驶,如车辆遇到突发危险情况时能自身主动产生制动效果让车辆减速(但具备这种功能的车辆并不一定能够将车辆完全刹停)从而提高行车安全性的一种技术。
第四项,夜视系统

带行人识别功能的夜视系统为驾驶者提供的视野超过大灯的光照范围,便于在夜间从较远的距离识别人和大型动物。防眩大灯中的动态标志灯功能可以选择性照亮它们。BMW双肾型进气格栅上安装的红外摄像头可以将车辆前面的图像传送到控制显示器。驾驶者可识别约300米之外的人与动物。发生危险时,系统会在成像显示没有激活时发出警告。具有行人识别功能的BMW夜视系统是BMW互联驾驶技术中的一项创新。
第五项,自适应巡航

自适应巡航控制系统是一种智能化的自动控制系统,它是在早已存在的巡航控制技术的基础上发展而来的。在车辆行驶过程中,安装在车辆前部的车距传感器(雷达)持续扫描车辆前方道路,同时轮速传感器采集车速信号。当与前车之间的距离过小时,ACC控制单元可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,以使车辆与前方车辆始终保持安全距离。
第六项,全景摄像头

环绕视图包括摄像机功能、全景视图、俯视图和3D视图。外后视镜正面和背面的摄像头能够提供车辆360°视图。驾驶者可以在三个功能之间切换,即俯视图、全景视图和3D视图。当系统下次使用时,最后选择的功能会自动重新激活。当汽车挂倒挡或者按下PDC按钮或全景视图按钮时,摄像系统会激活。摄像机捕捉到的图像会显示在控制显示器上。